





7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
自动驾驶的耳目知多少?激光雷达篇
众所周知,在众多自动驾驶的传感器中,大家对激光雷达的评价是必不可少。无论从最早的谷歌的“豆荚车”到层出不穷的车企测试案列,激光雷达已然成为标配。
那么今天我们来聊聊耳目中的大哥大,激光雷达(LIDAR)。
一,什么是激光雷达?
说到这个,我们还是得看看为什么这个不可或缺。首先,他其实就是一种测量距离的遥感技术。主要就是用激光照射目标物体,并用检测器来分析反射光,来测量距离。相信很多英语精通的人应该知道LIDAR其实就是Light Detection and Ranging的缩写。
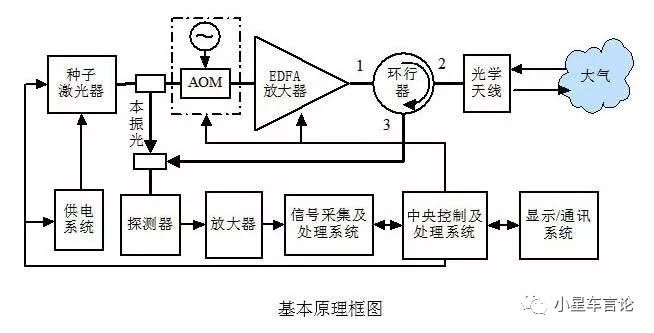
原理说明太复杂,多说无益,但是里面最必要的技术一定要说一下,就是飞行时间(TOF:Time of Flight),就是根据激光遇到障碍后的折返时间,计算目标与自己的相对距离。这些反馈回来的轮廓信息组成所谓的“点云”并绘制出三维环境地图,精度可达到厘米级。
现在业界对激光雷达的应用一般集中在以下几个方面
1,障碍物检测:这种研究最多,一般是通过测量汽车前方的高度信息确定障碍物的分布。
2,动态障碍物的跟踪:这个其实是环境理解的重要组成部分,主要包括行人跟踪和车辆跟踪等。

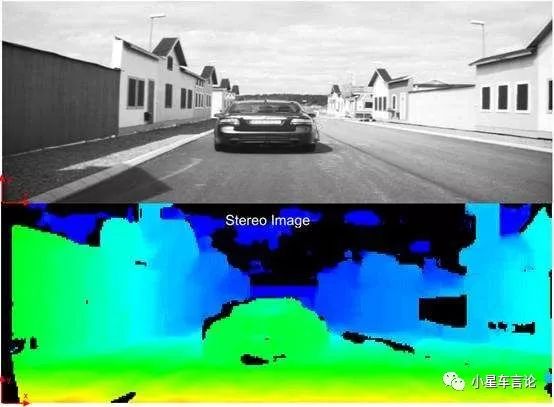
3,环境重建:随着激光雷达的普及和精度的提高,基于激光雷达的三维构建和即时定位与地图构建(SLAM:Simultaneous Localization and Mapping)的研究也取得了可人的进步。
当然,不同的激光雷达的构造存在差别,一般来说雷达纵向会依次发射出好几束激光,激光的数量叫线数,所有激光束在纵向打开的角度,一般称为纵向探测角度。目前主流的有1线,4线,8线,16线,32线,64线,128线等。同理,水平方向激光可以覆盖的探测范围就是水平探测角度。对于水平和纵向探测范围,一般角分辨率越小,激光雷达可以看清楚相邻两个物体的准确性就越高。

关于激光雷达到底多少线数,人们一直都有讨论。
1线激光扫描区域可以简单定义为一个平面,是一个二维扫描方案。
4线,8线一般纵向扫描范围为3.2°-6.4°,这个范围太小,也不能成为三维扫描,所以一般说2.5D扫描。
velodyne卖的64线纵向可达到30°,能够收集到整个环境三维点云数据,单位时间内反馈点越多,信息越大。
除此之外,还有个需要关注的参数。目前一般汽车上最常见的是762纳米或905纳米(主流)的激光。是因为其元器件价格便宜。劣势就是他的波长接近可见光(390-700纳米),可以轻易的被人眼聚集并吸收,所以在使用中要保证人眼安全。还有种1550纳米的激光,波长不被人眼聚集,但是技术元器件非常昂贵。所以用的比较少。
二,激光雷达车载方案趋势
车企一般在激光雷达的需求上主要集中以下几个方面
1,激光雷达小型化
在传统车企观念中,为了兼顾驾驶乐趣和风阻系数,自动驾驶汽车和普通汽车在外观上不应该有任何差别。
在未来,激光雷达最好能被做成小体积直接嵌入车身,这就意味着把机械旋转部件做到最小甚至抛弃,这也是现在业界慢慢抛弃现阶段激光结构,采用固态激光方案。
当然现阶段,也有些初创企业为了达到宣传效果,完全不顾及成本,在车上装128线做测试,也是屡见不鲜。

2,激光雷达安装偏向嵌入式方案
随着自动驾驶这几年的技术发展,有些激光雷达公司开始和零部件供应商合作,想办法把激光雷达隐藏在车灯中去。(IBEO)

对于乘用车来说,一些ADAS功能,激光雷达只需关注一个角度,因此不具备360°视角,如果L4级别更强调安全,需要覆盖水平360°视角,所以预计会用多点布局的方式覆盖全视角。
3,成本,成本,成本,重要的事说3遍!
现在在测试,只要能达到效果,成本无所谓,但是要走上量产这一步,要想让最终客户买单,能省一块钱是一块钱。主要车企对成本太敏感了,都希望能便宜。但是机械室雷达价格成本比较难降,相比这个,MEMS激光雷达,相控阵激光雷达,Flash激光雷达有可能给出价格更低的产品。

 分享
分享

图片新闻








最新活动更多
-
限时免费立即试用>> 燧石技术,赋光智慧,超越感知
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月30-31日报名参会>>> 全数会2025中国激光产业高质量发展峰会
-
7.30-8.1马上报名>>> 【展会】全数会 2025先进激光及工业光电展
-
精彩回顾立即查看>> 筑梦启光 砺行致远 | 新天激光数字化产研基地奠基仪式
-
精彩回顾立即查看>> 抗冻不流汗——锐科激光『智能自冷却激光器』重磅发布
推荐专题

先进激光技术应用峰会暨“维科杯”年度评选颁奖典礼")

中国先进激光技术应用峰会会后专题")















发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论