





7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
4D感知跨过V2X实现自动驾驶,激光雷达已未火先凉?
4D成像雷达很好的弥补了激光雷达的不足,而且从成本和量产角度来看,都能很好的得到控制与实现,会不会是下一个自动驾驶核心零部件?
电气化时代推动的不单单是电池产业的革新,也推进了摄像头、激光雷达、毫米波雷达这些关于自动驾驶的感知设备革新的速度。
从依靠雷达感知,到摄像头+雷达的融合感知,再进一步加入的激光雷达,这些我们此前陌生但现在耳熟能详的名词,都为了实现一个目标“拥有更加高阶的自动驾驶能力”。作为自动驾驶感知设备之一的毫米波雷达,多年普及之后也迎来了下一代技术演进——4D成像雷达。
那么,之后的4D成像雷达能否为自动驾驶带来新的高度?
4D成像雷达,究竟新在哪儿

我们不可否认的一件事儿,当下的自动驾驶水平已经达到L2/L3级别,接下来的发展是L4/L5级别。所以,现在整套感知体系的重点,已经从早期的“控制误警率”转变为现在的“避免漏识别”,市场需求在推动感知硬件的进步。
我们所熟知的毫米波雷达,最早的应用体验是ACC自适应巡航。直到现在我们也还能在具备自动驾驶功能的车上看到毫米波雷达的身影,探测距离远+应对雨/雪/雾恶劣天气下穿透性强,让它有着不可替代性,辅佐高清摄像头和激光雷达做到更好的感知。
传统毫米波雷达的不足:
1.无法提供被测量物体的垂直信息,只能提供水平数据;
2.由于没有高度信息,对静止物体难以识别,无法做出准确判断,单依靠毫米波雷达做决策判断可能导致误刹车/撞车风险;
3.点云融合困难,难以绘制地图,也是毫米波雷达于激光雷达的弱点。
进一步技术演进的4D成像雷达,需要满足两个条件,第一是具备纵向信息探测能力、第二能够形成点云图。为了满足以上两个功能,4D成像雷达行业内的做法分为两种:
1.多片毫米波雷达收发器MMIC级联,代表厂商采埃孚,拥有192个信道;
2.利用SAR技术实现虚拟孔径功能,代表厂商Oculii;
3.采用12发射、24接收大天线阵列,代表厂商华为。
MMIC级联其实很好理解,实现起来也相对简单,原理就是MMIC收发器用级联的方式获得比单个收发器使用时更大的增益效果。而另外一种“虚拟孔径”也可称之为合成孔径(SAR)的技术相对来说更有看点,这种技术之前在航天飞行器、卫星上的使用更普遍,主要用于测绘等用途。
一般毫米波雷达角分辨率和雷达孔径成正比,基本上市3发/4收的配置,由于雷达孔径有限角分辨率往往不能做的特别高,一般也就只是在10°左右。放在4D成像雷达上,有的厂商使用了软件算法实现在物理天线不变的情况下,利用算法虚拟出十倍的天线数,把角分辨率从10°提升到了1°,从而带来的是更高效的分辨出邻近的被检测物体。

站在车载应用上的角度去看,这样的好处是不受物理天线数(雷达体积)的局限性、算法优化虚拟倍数还能增加(还有可提升空间)。例如Oculii的双芯片EAGLE成像雷达,就是利用以上提到的技术,从而让角分辨率达到水平0.5°、纵向1°,探测距离350米以上,工作频率76-81GHz。
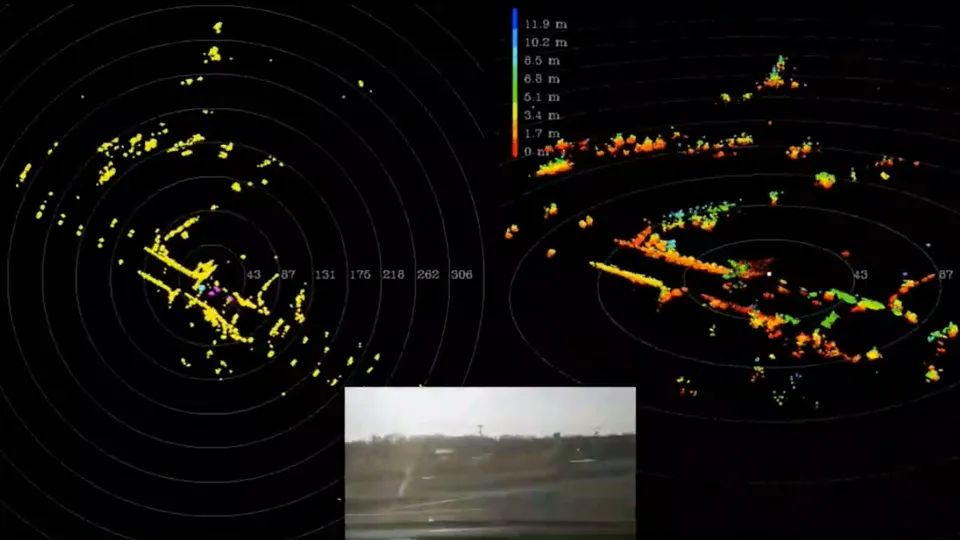
如果算法再次优化之后,角分辨率再提高之后形成的点云图很可能达到激光雷达的细致程度。
应用之后=高级别自动驾驶必备?

不得不承认,4D成像雷达在继承了传统毫米波雷达穿透性强、应对雨/雪/雾恶劣天气下稳定工作的条件之后,做到了高分辨率、点云图以及测量物体的垂直数据之后,也铺好了让自动驾驶功能走向高级别前进的路。
目前的主流自动驾驶功能还停留于L2/L3级别,主要依赖的感知设备包括了摄像头+毫米波雷达+激光雷达的组合。而摄像头+毫米波雷达组合的这种方案很常见,但这种方案分辨率低而且获得的数据不够丰富(例如高度信息);激光雷达可以弥补上述问题,但激光雷达成本较高,限制了大规模应用,而且在应对恶劣天气的条件下存在不稳定因素。
之后就有了一个问题,4D成像雷达怎么推动高级别驾驶落地?答案是:会,但需要在特定场景下。
先理清自动驾驶与成像雷达之间的关系,成像雷达只是感知设备硬件,具体作用只是作为对车辆周围物体的感知、数据收集;最终实现自动驾驶功能的,还是依靠算法+感知设备才能最终实现。
如果加入到现有的感知设备当中,它能起到什么作用?依托良好的穿透性,在视觉感知设备、激光雷达面对恶劣工作环境的环境时,成像雷达的作用就会被放大,从而能实现全天候的感知(类似于激光雷达)。可以说4D成像雷达是对现有感知设备的一个补强,虽然它的功能很接近激光雷达,但它暂时还不能替代激光雷达的存在。
另外,还有技术创新的可行性方案,还是利用算法做自适应调频来提高虚拟天线数量,举例:快速路可以调高功率看的更远,让激光雷达和摄像头或许获取信息,提早规划路线;在城市道路,调低频率采集近景信息,提高准确率。

4D成像雷达车载之前需要面对的问题:
1.使用级联方式的雷达,可能需要增加实体天线增加功率,从而需要解决装车体积问题;
2.使用虚拟孔径方式的雷达,由于虚拟十倍左右的天线数量,需要做好天线抗干扰问题;
3.满足车规级要求,稳定、可靠并且能满足抗干扰能力。
如果4D成像雷达上车,很可能先应用到的高级自动驾驶场景是高速路段辅助驾驶、高阶智能泊车功能;一个是前向雷达角分辨率的提升,一个是提升近距离探测能力。更多情况下,4D成像雷达可能会作为激光雷达的补充。
总结
4D成像雷达弥补了传统毫米波雷达没有的高分辨率,但还拥有在任何极端环境下拿到有效信息且工作稳定的可靠性,这一点弥补了激光雷达的不足。同时,各大Tier 1对于毫米波雷达的制造技术也相对成熟,对于4D成像雷达的成本上也能很好控制,并且更具备量产的可能性。
目前不论是Tier 1头部企业,还是初创公司、科技企业,都纷纷入局4D成像雷达这个领域。硬件相对于算法来说,解决起来更容易,但硬件背后配套使用的4D成像雷达的算法也会成为另一个竞争点,而随着技术的迭代,4D成像雷达可能会逐渐接近于激光雷达的使用效果。
作者丨张晨伟
原文标题 : 4D感知跨过V2X实现自动驾驶,激光雷达已未火先凉?

 分享
分享

图片新闻








最新活动更多
-
5月22日立即预约>>> 宾采尔激光焊接领域一站式应用方案在线研讨会
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月30-31日报名参会>>> 全数会2025中国激光产业高质量发展峰会
-
7.30-8.1马上报名>>> 【展会】全数会 2025先进激光及工业光电展
-
免费参会立即报名>> 7月30日- 8月1日 2025全数会工业芯片与传感仪表展
-
精彩回顾立即查看>> 锐科激光《锐见·前沿》系列前沿激光应用工艺分享
推荐专题

先进激光技术应用峰会暨“维科杯”年度评选颁奖典礼")

中国先进激光技术应用峰会会后专题")














发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论