





7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
我们离自动驾驶还有多远(下)
作者:JK
欢迎回到我的公众号,前两期文章滴滴自动驾驶体验、自动驾驶分级介绍以及各国在自动驾驶和车联网方面的战略发展对比,这篇文章作为本期主题的最后一篇文章,将会对自动驾驶涉及关键技术领域进行全面剖析,都是硬核干货,请系好安全带,我们发车了。

车载感知技术
01
视觉感知
还记得我们在上篇文章提到的以视觉感知技术路线发展的特斯拉吗?通过视觉感知以及强大的算法能够将道路上的行人和车辆显示在车载屏幕上,非常直观。视觉感知简单理解就是在车的四周装上足够量的摄像头,使其有能力捕捉车身周围的情况,从而一定程度了解决了司机的盲区问题。学过车的同学一定还记得,科目二的你一定无时无刻不盯着后视镜;开车买车的时候也喜欢有倒车影像功能的车。
自动驾驶所需的车载摄像头主要分为单目摄像头、双目摄像头和三目摄像头。
单目摄像头主要通过摄像头拍摄的平面图像来感知和判断周围情况、识别车辆、路标和行人等物体,也是目前车载摄像头的主流解决方案,依托于强大的算法和深度学习能力,根据其安装的位置不同,分别可以提供车道偏离预警、前向碰撞预警、行人碰撞预警、交通标志识别等。其优点是成本低,但需要不断的样本来学习以保证识别率同时准确度相对较低。
双目摄像头通过模仿人眼的功能,通过对图像进行视差计算和立体匹配计算精准测距。双目摄像头的应用场景也相对类似,但因为无需识别物体只需要测距,所以精度更高,但其图像的运算量相比单目的要高出一些,对计算单元(芯片)的性能要求较高。
三目摄像头通过三个摄像头覆盖不同范围,解决了摄像头无法自动切换焦距的问题,拥有更好的视野广度和精度,目前因为其计算量大,芯片的性能要求更高,成本也更高,目前商用车采用的还是较少的。

摄像头识别物体示意图
02
听觉感知
听觉感知主要指超声波雷达,通过测算由超声波发射装置发射超声波和接收器接收返回的超声波时间差计算距离,其成本低,探测范围在0.1至3.0米,短距离探测非常有优势。特斯拉就配备了12个超声波传感器,来探测附近车辆,降低碰撞风险和辅助泊车。
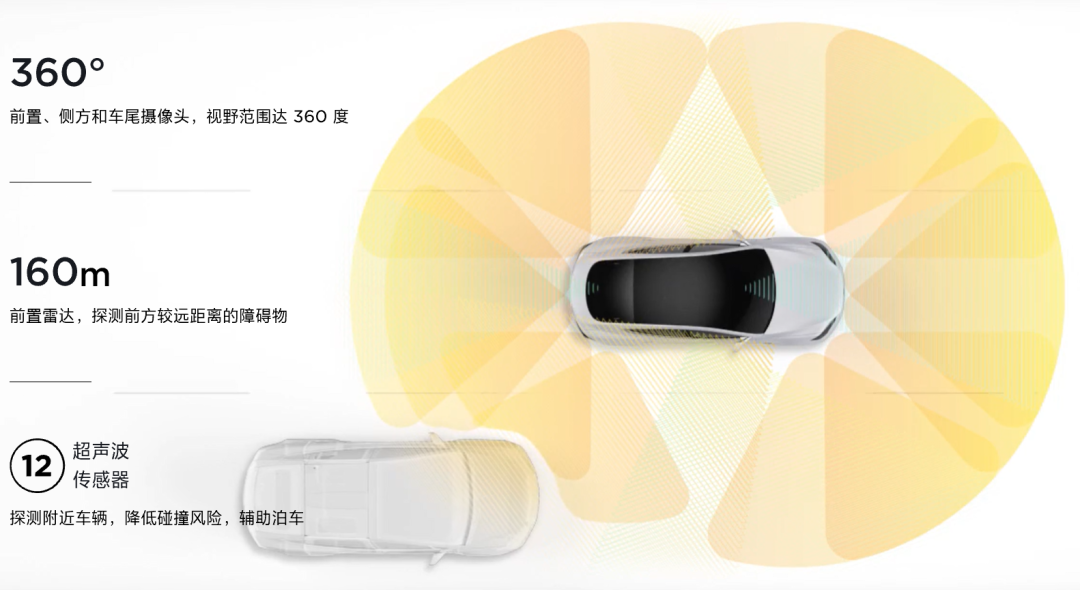
特斯拉传感器示意图
03
毫米波雷达
车载毫米波雷达的技术最为成熟、鲁棒性最高,可以探测车辆与目标物体之间的距离,主要用于碰撞预警、自动巡航、制动辅助和泊车辅助等功能。它是利用波长1至10nm,频率24GHZ至300GHZ的毫米波,通过返回波形和发出波形的频率计算障碍物的距离。之前提到的单双目摄像头在遇到尘雾或者雨雪天气时,非常容易被干扰,出现识别问题,但毫米波雷达可以轻松穿透尘雾、雨雪等,具有探测性能稳定的优势,其劣势为探测距离有限、精准度较差(距离越远,信号损耗越大)以及无法识别物体。
毫米波雷达按照频率一般分为24GHz、77GHz和79GHz两种,前者用于中短距离雷达,后者用于长距离雷达。24GHz的技术难度和成本较低,目前占据了毫米波雷达的主要应用市场。而77GHz的毫米波雷达产品目前主要是国外产品为主,如博世、大陆等,中国已经有24GHz的毫米波雷达量产,但77GHz还处于研发阶段。

毫米波雷达不同频率对比
04
正是因为毫米波在精度上还差那么点意思,也就有了激光雷达。激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;抗干扰能力强;获取的信息量丰富,可直接获取目标的距离、角度、反射强度、速度等信息,生成目标的多维度图像;可全天时工作。相比于毫米波雷达,激光雷达可实现对人体的探测,相比于摄像头,激光雷达的探测距离更远。
激光雷达也一跃成为实现更高级别自动驾驶的关键组件。前不久蔚来宣布将于2022年交付的轿车ET7是业界首次搭载激光雷达,也掀起了行业内车企逐渐采用激光雷达的浪潮。2021年也许会成为激光雷达产业加速发展的开端之年。
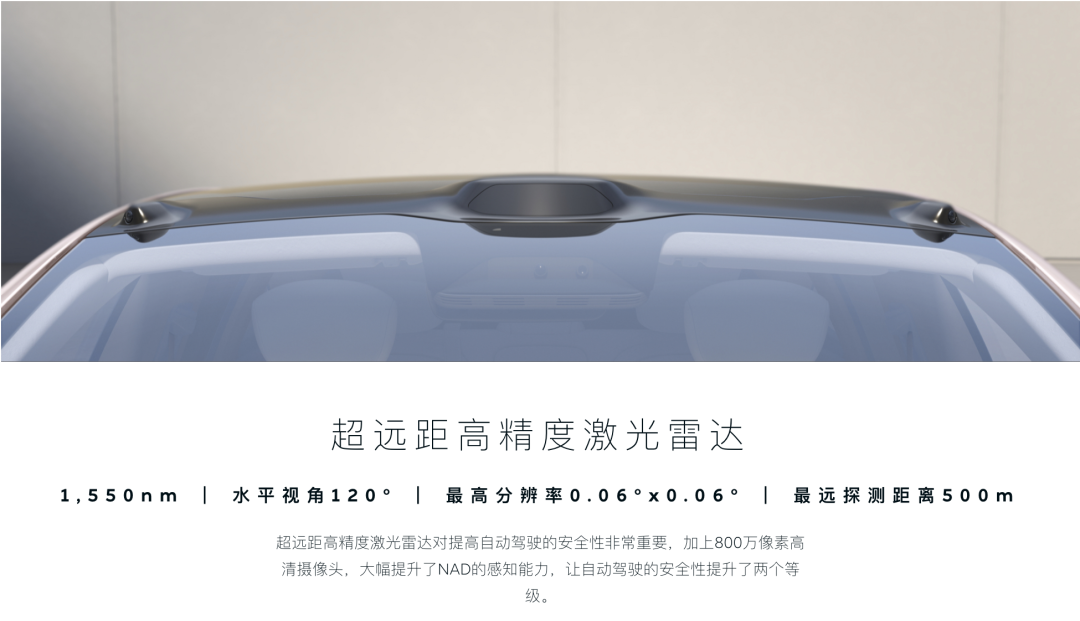
蔚来ET7轿车采用激光雷达
蔚来激光雷达成像视频
就激光雷达发展路线而言,不难发现去年我体验到的滴滴自动驾驶车顶上的应该是机械式早期激光雷达,成本非常高。通过下图能够很好的了解今后激光雷达的发展路线。

激光雷达发展路线
05
感知融合技术
前面讲了很多感知技术,如果不能有效的将这些组件结合起来使用,那就很难发挥出每个组件的优势,所以多传感器融合成为提升感知可靠性的主要手段,也是实现自动驾驶的前提条件之一。结合激光雷达、毫米波雷达和视觉传感器融合,可以获得更高精度的3D信息,并且通过不同信息的互补、交叉验证,将语义感知的准确性提升数个数量级。细心的朋友一定能够发现无论是特斯拉(视觉主导路线)还是谷歌(激光主导路线)或多或少都会有毫米波雷达作为感知技术的重要补充。
技术路线上,多传感器融合感知主要有数据级的前向融合和特征级的后向融合两种。目前主流的实现方式为特征级的后向融合,具体是指通过单个传感器进行特征提取,再将有限特征信息进行融合优化,其难点是需要解决不同传感器的置信度以及传感器噪声问题。
高精地图+GNSS
前面我们提到的这些车载感知技术都是基于单车智能的范畴,但为了提高精度以及应对恶劣天气、重复场景、非视距场景和车载传感器不稳定的情况,高精度定位在自动驾驶中起了决定性作用。在不同的行车场景下,对于定位精度的要求是多变的,以往的普通导航地图已经无法满足需求了。高精地图可以精确到厘米级别,其数据维度也更多(包括道路信息和周围静态信息、数据高度动态化、数据更新频率约为秒级别。
从地图使用者角度来讲,传统的地图导航是给人用的,我们每天开车都会手机上开个百度导航,但高精地图的使用者是机器,属于自动驾驶安全系统中的一部分。高精地图具有地图匹配、辅助环境感知和路径规划等功能,地图匹配可以使得车辆进准定位在车道上;路劲规划上可以提前感知车速限制、人行横道或者道路施工区域等,让车辆提前感知并作出处理。
未来实现车辆网的目标则需要通过多种技术的融合来实现精准定位,其中就包括GNSS(Global Navigation Satellite System)、无线电、惯性测量单元、传感器及高精度地图。根据L4/L5级别对于定位系统指标的要求是非常严苛的。

L4/L5定位指标要求
对于各技术之间如何联动,IMT-2020(5G)推进组给出了详细的网络架构图。
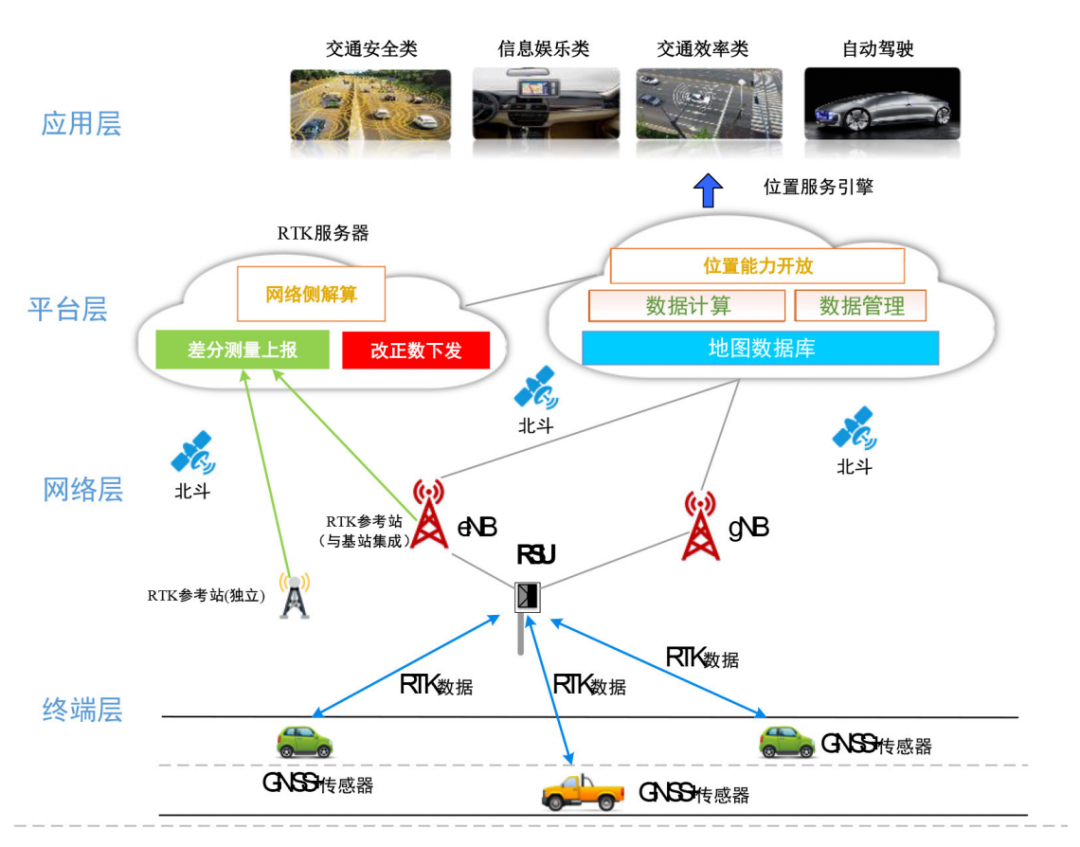
高精度定位网络架构图
因为地图涉及国家机密,所以目前拥有导航电子地图制作(甲级)测绘资质的公司也不是很多,百度、阿里等公司都以收购的方式拥有了自己的导航电子地图制作能力。

甲级测绘资质公司名单
多接入边缘计算+仿真测试

 分享
分享

图片新闻








最新活动更多
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月30-31日报名参会>>> 全数会2025中国激光产业高质量发展峰会
-
7.30-8.1马上报名>>> 【展会】全数会 2025先进激光及工业光电展
-
免费参会立即报名>> 7月30日- 8月1日 2025全数会工业芯片与传感仪表展
-
精彩回顾立即查看>> 锐科激光《锐见·前沿》系列前沿激光应用工艺分享
-
精彩回顾立即查看>> 维度光电·引领光束质量分析应用全新浪潮【免费下载白皮书】
推荐专题

先进激光技术应用峰会暨“维科杯”年度评选颁奖典礼")

中国先进激光技术应用峰会会后专题")














发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论